
官方微信视频号


解决方案
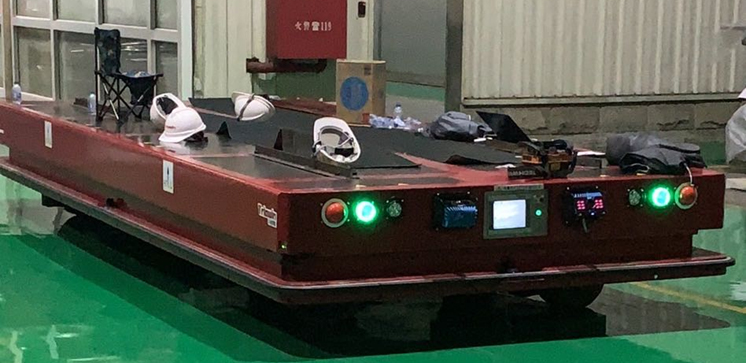
重载AGV技术解决方案
重载AGV是面向仓储、制造、重工、冶金领域的机器人,规划其负载为10T、采用自然轮廓激光导航的方式,改善目前人工搬运铝卷的现状,减少人工成本,提高工厂的自动化水平。

解决方案
针对上述重载AGV的自由导航需求,初步决定采用A*算法进行解决,即在起始位置与目标位置之间,自主规划出一条可以避开所有固有静止障碍物的路径。
■ 功能特点
重载AGV系统上位机具备有连接小车、建图算法、显示地图、编辑任务、显示机器人状态等功能。


