


官方微信视频号
![]()
机械狗蒙眼在台阶上横着走! 韩国最新AI控制技术让其快速适应各种地形
时间:2023-07-21 11:53:11
来源:上海机器人产业技术研究院
给狗狗蒙上眼睛,它还能走路吗?

真狗不一定,但这只机械狗可以。

蒙上眼睛后不仅能正常走路,还能适应各种复杂地形!
在杂草丛生的树根上爬上爬下:

在布满泥土和石头的山路还能如履平地:

上下台阶也毫无压力,甚至能在台阶上横着走:、

在这些任务中,机械狗是完全看不见的,所以它并不知道下一秒自己会身处什么环境,但当脚触碰到台阶的那一刻,它就能快速地做出调整并适应当下。

这么牛的绝活是怎么练成的?
▍如何练就“蒙眼行走”的绝活
这项“蒙眼行走”的绝活是韩国科学技术院 (KAIST) 电气工程学院团队的最新研究——DreamWaQ 技术,他们给狗取名为“DreamWaQer”,意思是闭着眼在梦里也能正常行走。

大多数步行机器人的控制依赖于运动学和动力学模型,以确保稳定行走,这需要快速获取地形环境信息。其主要的优化空间在于提升对周围环境的认知能力。

相比之下,DreamWaQ 技术是一种基于深度强化学习 (RL) 开发的控制器,大致过程如下:
1. 先学习模拟器中的各种环境数据;
2. 在实际应用中,想象哪个环境与模拟学习中的类似,在脚接触到地面的那一刻迅速绘制出之前学习的地形信息;
3. 利用这些信息快速计算出相应的控制命令,再将它们传输给机械狗的各个电机,从而快速适应步行。
它主要由上下文估计网络和策略网络组成,前者通过惯性信息和关节信息隐式地估计地面信息、显式地估计机器人状态;然后将信息馈送到策略网络,生成最佳控制命令。
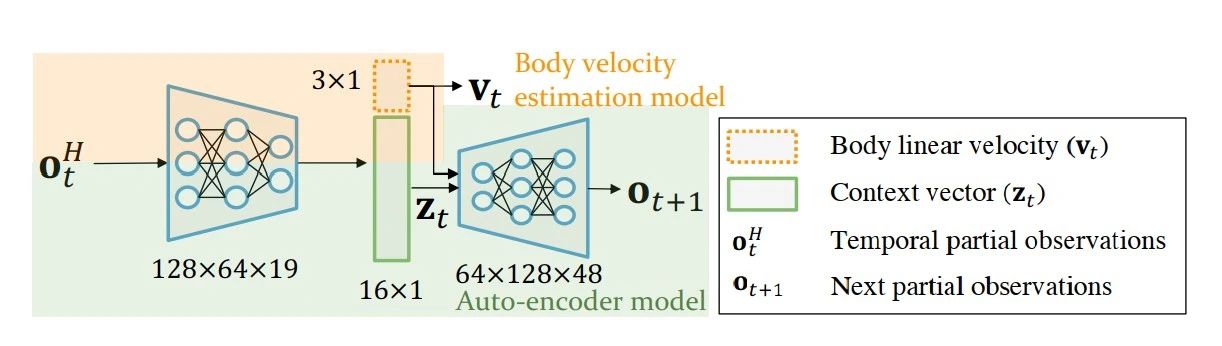
而在最初的模拟器学习中,控制器的两种网络利用不同方法进行学习:上下文估计网络使用了监督学习方法;策略网络使用了演员-评论家方法(一种深度强化学习方法)。
在支持GPU的PC中,整个学习过程只需要约一小时的时间,而且这项技术不限于机械狗,它不需要根据特定的机器人进行重新编排或额外的调整过程,因此任何一个步行机器人都可以使用这项技术。
▍DreamWaQer 的实际测试
在 DreamWaQer 机械狗的实际测试中,只进行了策略网络的学习,在看不到周围环境的情况下,它仅使用机器人内部的惯性传感器 (IMU) 和关节角度的测量估计机器人当前的状态。
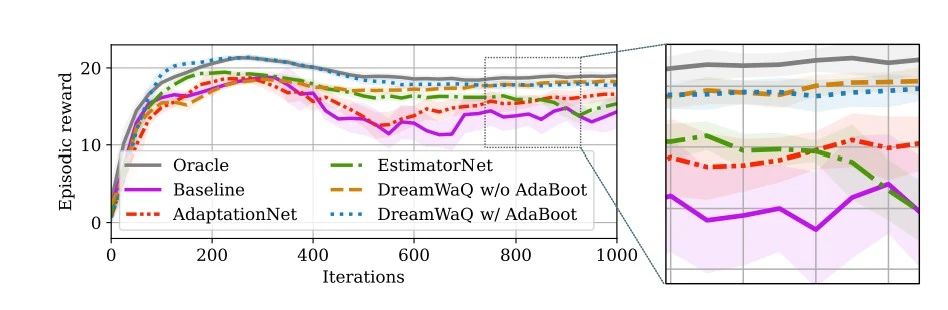
虽然只经过了这种“半吊子学习”,但机械狗的测试结果依然令人满意。

它不仅能在实验室中行走,研究人员还将其带到了复杂的室外环境中进行测试,结果证明它能克服多种复杂严苛的地面环境,稳定行走的速度范围可在 0.3m/s 到 1m/s 之间。

这项研究原定在5月底伦敦举行的 IEEE 机器人与自动化国际会议 (ICRA)上发表,目前可以在arxiv网站中看到它的预印版“DreamWaQ: Learning Robust Quadrupedal Locomotion With Implicit Terrain Imagination via Deep Reinforcement Learning”

在文章的结尾,作者表示DreamWaQ还有一定的局限性,机器狗必须首先用腿碰到障碍物,才能开始一系列的操作。未来他们将进行更复杂的处理——在其接触障碍物之前改进步态规划,这需要进一步将外部感觉集成到运动系统中。
一起期待它未来的表现吧!
推荐新闻
-
国评中心(总部)为安川颁发机器人洁净级认证证书!
2024-09-25 -
JAKA拿下协作机器人全系列CR认证“001”证书
2024-09-19 -
KUKA全系列机器人获得CR认证
2024-09-14 -
2024世界机器人大会机器人行业规范检测与技术分论坛在京圆满举行
2024-08-25 -
国评中心(总部)北京测评中心正式揭牌!
2024-08-24 -
首届智能机器人分级分类评价创新论坛在上海召开
2024-07-05 -
上海成立机器人概念验证中心
2024-06-25 -
【研发成果】轻量化、模块化、智能化的移动机器人面市!
2024-06-20 -
机器人赛道逐渐拓宽,人形机器人正当时?
2024-07-01 -
【祝贺】艾利特CS系列协作机器人通过100000小时MTBF测评!
2024-01-03 -
协作无界,“加”速未来—2023首届中国(盐城)机器人+新能源产业发展大会在盐城顺利召开
2023-12-25

