


官方微信视频号
![]()
一场属于机器鱼的“奇幻漂流”,可在细小血管中“逆流而上”!
时间:2023-04-16 09:45:00
来源:网络
随着科技的发展,微型机器人越来越受到大家的关注。如果有一只机器鱼能依靠磁控在血管中逆流而上,会是一种什么样的情景?
材料科学和微纳制造技术的发展,使毫米或亚毫米尺寸的微型软机器人可以被制造和远程驱动。同时,小型机器人也具有以非入侵方式进入人体难以到达区域的独特本领。不过到目前为止,微型机器人在人体多样化和动态的环境(如血液流动)中准确移动仍然具有挑战性。
▍一种微型磁驱软体鱼
为了解决这项难题,近日,香港中文大学、深圳人工智能与机器人研究院和多伦多大学的研发团队设计了一款能够在流体环境中进行超快游泳的微型游泳机器人。这是一种磁驱软体鱼,研究人员还展示了其能够在血管中运动的潜力。

据悉,这款磁驱软体鱼在水中的最大速度可达30 cm/s(60 BL/s),在仿血管状环境中可以达到17 cm/s的游泳速度。当流速为10 cm/s时,磁驱软体鱼也可以以5 cm/s进行逆游。同时,研究人员还展示了一种超声波导航成像功能。
该研究以论文的形式发表在中国科技期刊卓越行动计划高起点新刊Cyborg and Bionic Systems上,标题为Ultrafast miniature robotic swimmers with upstream motility。

图片论文地址:
https://spj.science.org/doi/10.34133/cbsystems.00
▍小鱼身板有大力量
相对于光、电和化学等驱动控制策略而言,磁场控制下的微型机器人可实现无线操纵且具有高自由度和变形能力。由于磁场便于产生和控制,能够安全地穿透生物组织和其他材料,因此磁场驱动成为了控制微型机器人的更佳选择。
那么这条在血管里“跑酷”的机器鱼是啥构造?
为了实现最大程度上的仿生,研究人员将其设计成流线型结构,鱼身由聚二甲基硅氧烷(PDMS)和钕铁硼微粒的混合物铸造而成,而鱼尾巴由PDMS材料制成。为了适应人体的生物环境(人动脉血管直径不超过1 cm,厚度为1 mm左右),磁驱软体鱼的长度仅为 5 mm,非常小巧。
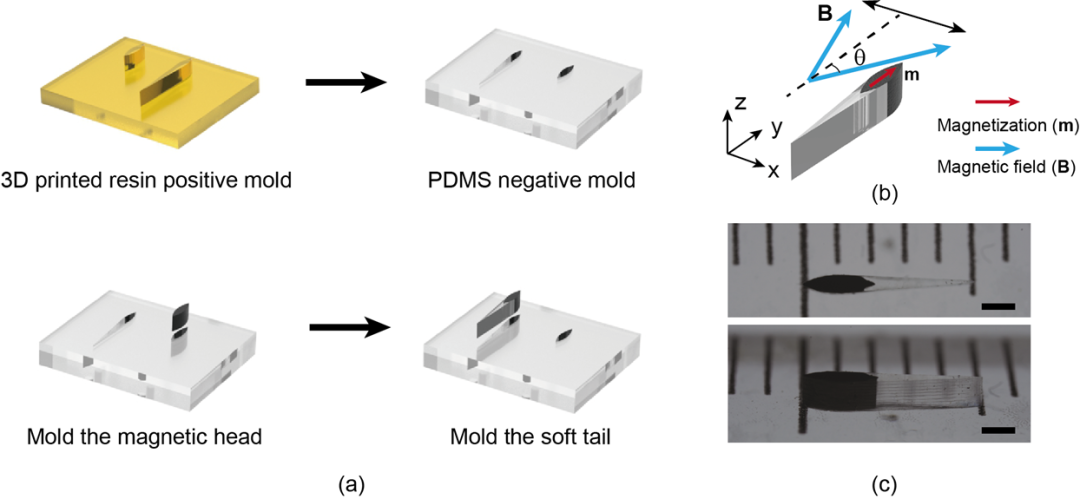
微型磁驱软体鱼的设计和制造
虽然足够小巧,但游泳能力不弱。研究人员通过施加不同振荡角和不同频率的磁场来控制它的运动。实验发现,例如当频率为60 Hz,振荡角为40°时,磁驱软体鱼可以达到30 cm/s的游泳速度。

磁驱软体鱼在水中的游动性能

磁驱软体鱼自下而上的游动
为了模拟评估这个“小个子运动员”在“血管”中的游动能力。研究人员们在直径4.1 mm的玻璃管中对其进行了游泳能力测试:
小型机器人在血管中的运动
实验结果显示,当磁场的振荡角设置为20°时,磁驱软体鱼游动速度可以达到最快。但是由于在密闭空间内的碰撞,动能的损失使得游泳速度下降,但最大游泳速度仍可以达到17 cm/s。
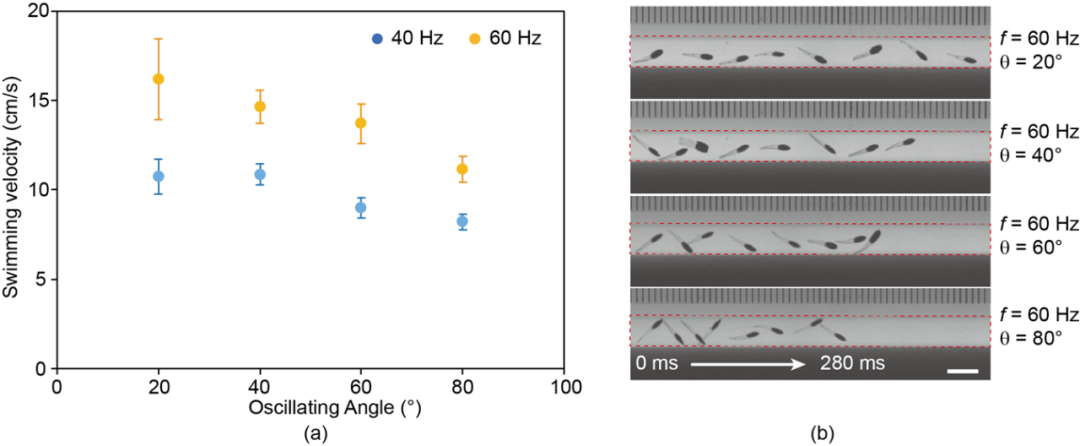
磁驱软体鱼在细管中的游动性能
▍面对“逆境”展现出的游动能力
在静态环境实验取得了满意的测试结果后,研究人员开始了机器鱼的“逆行”之旅:


磁驱软体鱼在细管中的逆游性能
如图中所示,当磁场的振荡角为40°时,磁驱软体鱼的最大速度达到13cm/s(水流速度5cm/s),而水流速度加到10cm/s时,可以达到4cm/s的游泳速度。
当研究人员将其放入猪血中,由于血液粘度较高,机器鱼最大游动速度降至11.6cm/s。

磁驱软体鱼在猪血中的游动性能
由于微型机器人在人体内的成像和导航是无线医疗机器人临床应用中的一个关键挑战,研究人员使用了超声设备,将磁驱软体鱼放置在血管模型内,使用超声设备对软体鱼进行成像和监测,并由频率为30赫兹、振荡角度为30°的振荡磁场驱动。
从下图可以看出,磁驱软体鱼可以在超声成像下游过血管。
超声波引导磁驱软体鱼运动。
▍结语
该项研究证实了磁驱软体鱼可以作为药物的载体,与其他成像方法(如数字减影血管造影)和电磁设备相结合,并被快速导航到人体的目标区域,在通过血管系统进行靶向药物递送、单个细胞转运和血管疏通等方面凸显了巨大的应用潜力。
不过,从现有研究来看,磁控微型软体机器人研发的结构和功能还较为简单,控制原理和运动特性等方面研究还不够完善。
接下来,研发团队将计划开发可实现多种运动模式的磁控微型软体机器人及其控制系统,使其可以在陆地、水面和水中等不同环境下运动,实现在多栖环境之间的自由移动;同时进行多机器人协同控制以胜任更加复杂的任务。
想象一下机器鱼成群结队的画面,不知道集齐七条能召唤神龙吗?
推荐新闻
-
国评中心(总部)为安川颁发机器人洁净级认证证书!
2024-09-25 -
JAKA拿下协作机器人全系列CR认证“001”证书
2024-09-19 -
KUKA全系列机器人获得CR认证
2024-09-14 -
2024世界机器人大会机器人行业规范检测与技术分论坛在京圆满举行
2024-08-25 -
国评中心(总部)北京测评中心正式揭牌!
2024-08-24 -
首届智能机器人分级分类评价创新论坛在上海召开
2024-07-05 -
上海成立机器人概念验证中心
2024-06-25 -
【研发成果】轻量化、模块化、智能化的移动机器人面市!
2024-06-20 -
机器人赛道逐渐拓宽,人形机器人正当时?
2024-07-01 -
【祝贺】艾利特CS系列协作机器人通过100000小时MTBF测评!
2024-01-03 -
协作无界,“加”速未来—2023首届中国(盐城)机器人+新能源产业发展大会在盐城顺利召开
2023-12-25

