


官方微信视频号
![]()
激光在移动机器人中的应用
时间:2018-11-08 09:15:00
来源:上海机器人产业技术研究院
作者:小R
▍概述
激光之于移动机器人来说,相当于眼睛之于人。无论是室外环境下行驶的陆地自主车还是室内环境下运动的各种移动机器人,都离不开距离探测。而在有源测距仪中,激光雷达的精度相对较高,方向性较好,而且基本不受环境可见光变化的影响,因此无论在室内还是室外环境下,激光在移动机器人研发中都得到了广泛应用。
▍激光的分类
根据扫描机构的不同,激光测距雷达有2D和3D两种。它们大部分都是靠一个旋转的反射镜将激光发射出去并通过测量发射光和从物体表面反射光之间的时间差来测距。3D激光测距雷达的反射镜还附加一定范围内俯仰以达到面扫描的效果。它们都是直接测距方法。同3D激光测距雷达相比,2D激光测距雷达只在一个平面上扫描,结构简单,测距速度快、系统稳定可靠。
▍激光在移动机器人中的用途
目前2D激光测距雷达主要在室内的移动机器人上应用较多,因为在室内的结构化环境下,地面平坦,所有障碍物又都垂直于地面,因此机器人只要能在平行于地面的平面上获取环境信息便己经足够导航的需要。很多室内移动机器人的应用,如环境的地图生成,机器人的自定位,避障等等的研究都是基于2D激光测距雷达的。在陆地移动机器人的导航中,3D激光测距雷达应用得比较多。
因此,激光在移动机器人中中主要应用在以下三个方面:
(1)路标检测及地图匹配
(2)越野行驶时建立地形图
(3)障碍物检测
▍应用举例
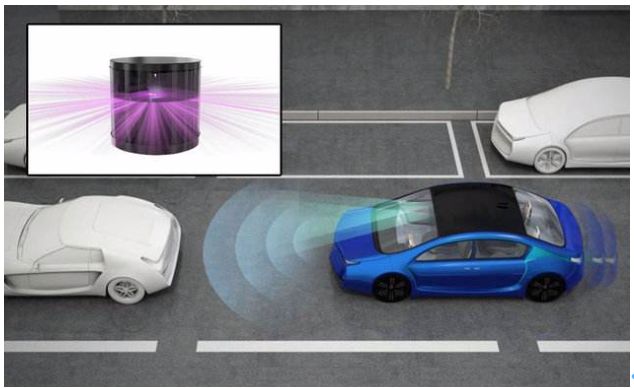
无人自动驾驶车辆
无人自动驾驶车辆,是室外轮式移动机器人在交通领域的重要应用。智能车的关键技术大致包括定位技术、车辆控制技术和安全三个方面。而定位技术是智能车基本的环节。在众多车载传感器中,激光雷达测量精度高,已经成为大部分智能车车载的一种传感器。其主要原理是采用将智能车的位置传感器(如里程计、惯性导航单元或者GPS等)提供的信息和外部环境传感器(二维激光雷达等)提供的信息进行融合,从而得到智能车的精确定位。
扫地机器人
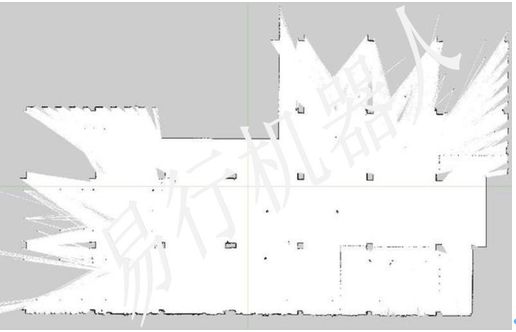
扫地机器人是激光雷达应用比较广泛的领域,激光雷达配合slam算法,可以让扫地机器人在房间里实现智能清扫,激光导航扫地机器人能够绘制精确的地图界面,提供相对于传统扫地机器人更好的规划导航,轨迹可视功能,实时传输到手机APP,就算用户不在家,也可以通过手机APP查看清扫情况,以及安排其他地方清扫。

工业AGV小车
经过这几年的快速发展,AGV已经是自动化行业众所周知的了。从2015年受宠的磁条导航、磁钉导航、惯性导航(二维码),到现在流行的激光slam导航,短短几年时间,AGV导航技术快速迭代发展。其中,基于环境自然导航(slam)AGV因其众多的优点备受关注。

基于环境自然导航的激光AGV中,机器人在运动过程中通过编码器结合IMU计算得到机器人的位姿初估计,然后通过机器人装载的激光传感器获取的激光数据对机器人位姿进行精确修正,得到机器人的精确定位,反复如此,机器人在环境中运动,完成整个场景地图的构建。
在完成场景地图构建后,需要在所构建的地图基础上进行基于地图的位置和路径规划来实现AGV的导航。从而进一步的应用于工业仓储、分拣、物流、停车等方面。
上一条:工业机器人选型建议
下一条:走进上肢双臂康复机器人的世界
推荐新闻
-
国评中心(总部)为安川颁发机器人洁净级认证证书!
2024-09-25 -
JAKA拿下协作机器人全系列CR认证“001”证书
2024-09-19 -
KUKA全系列机器人获得CR认证
2024-09-14 -
2024世界机器人大会机器人行业规范检测与技术分论坛在京圆满举行
2024-08-25 -
国评中心(总部)北京测评中心正式揭牌!
2024-08-24 -
首届智能机器人分级分类评价创新论坛在上海召开
2024-07-05 -
上海成立机器人概念验证中心
2024-06-25 -
【研发成果】轻量化、模块化、智能化的移动机器人面市!
2024-06-20 -
机器人赛道逐渐拓宽,人形机器人正当时?
2024-07-01 -
【祝贺】艾利特CS系列协作机器人通过100000小时MTBF测评!
2024-01-03 -
协作无界,“加”速未来—2023首届中国(盐城)机器人+新能源产业发展大会在盐城顺利召开
2023-12-25

