


官方微信视频号
![]()
Science Robotics封面:加州理工团队用电子皮肤控制机械臂,还能赋予多模式感知!
时间:2022-08-16 09:50:59
来源:网络
想要自如地操纵一台机械臂,只需在手臂贴上一片薄薄的‘电子皮肤’:
通过自己的肌肉运动来控制机器人,看起来是不是超酷!如果不想贴在手臂上,那贴脖子上试试:

你抬一下头,机械臂也跟着抬一下,不过这时间长了估计颈椎受不了,还是换回手臂上吧。
这片薄薄的‘电子皮肤’不仅能让机械臂像是长在自己身上一样控制自如,还能让机器人拥有多维度的感知能力!
这种感知包括接近、触觉和温度感知,机器人还能够感受到现场的有毒物质,如爆炸物、新冠病毒等,并通过实时触觉和威胁警报反馈通信给人类,比如让机器人去抓一个鸡蛋,如果抓得太紧有压碎蛋壳的危险,你的皮肤会感到“有点刺痛”。
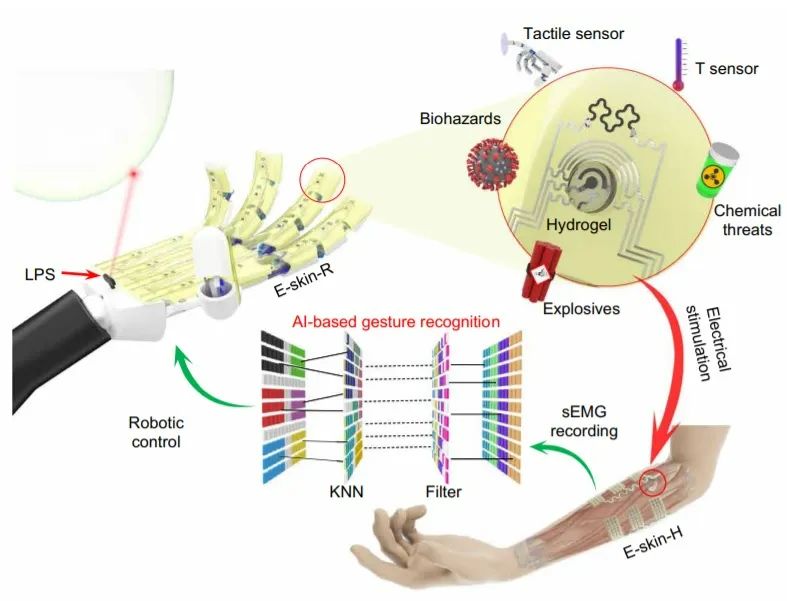
这是一种由AI驱动的人机交互多模式传感机器人系统 (M‑Bot),来自加州理工学院医学工程系高伟(Wei Gao)教授研究团队,并登上了《Science Robotics》期刊六月的封面,文章标题为“All-printed soft human-machine interface for robotic physicochemical sensing”

M‑Bot的核心是两片水凝胶“电子皮肤”:e-skin-R和e-skin-H,二者可形成一个闭环人机交互机器⼈传感系统。一片贴在机器人手指上,用于感知和检测周围环境;另一片贴在人类皮肤上,用于机器人的手部控制。

▍自研纳米墨水打印电子皮肤,让机械手能检测新冠病毒
在e-skin-R中,嵌入在水凝胶中的是传感器通过喷墨打印在皮肤上,就像喷墨打印机将文本打印到一张纸上一样,这里可不是普通的墨水,而是团队自开发的多种纳米材料墨水,可以低成本的将多种纳米材料等修饰在柔性基底上,并构建相应物理及化学传感器。
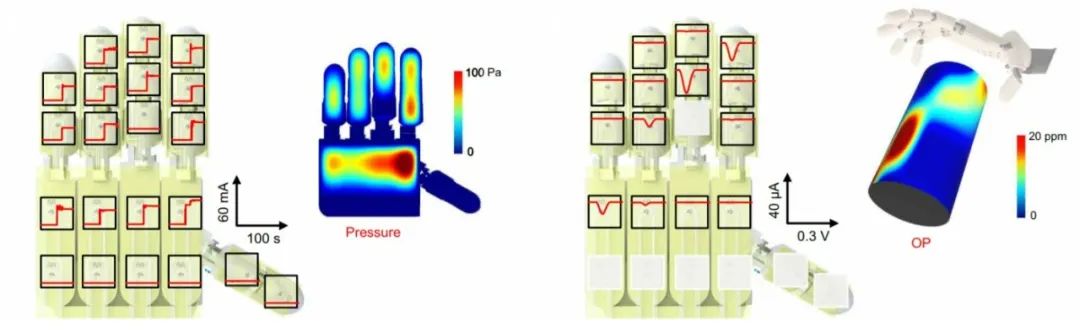
通过将银纳米线修饰在具有特殊表面结构的聚二甲基硅氧烷(PDMS)上,构建压阻式压力传感器,可以赋予机械手触觉感知;
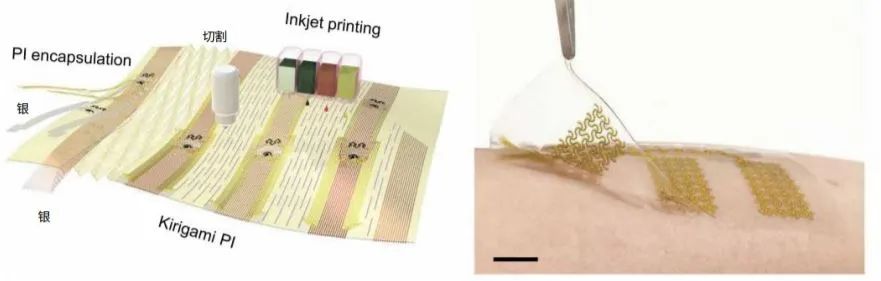
同时,修饰铂纳米粒子参杂的石墨烯和MOF-808/金纳米粒子的两种电化学传感器,在水凝胶帮助下能够分别原位检测微量的TNT与有机磷。针对新冠病毒检测,研究团队在喷墨打印的碳纳米管基础上,修饰有相应的新冠病毒突刺抗体,通过电化学信号的强弱实现对新冠病毒的原位实时检测。
▍用自己的皮肤实时接收反馈
e-skin-H充当人机交互界面,由四个 sEMG 电极阵列(通道)和⼀对电刺激电极组成,可以收集生理数据,采集通过肌肉收缩产生的表面肌电(sEMG)信号。
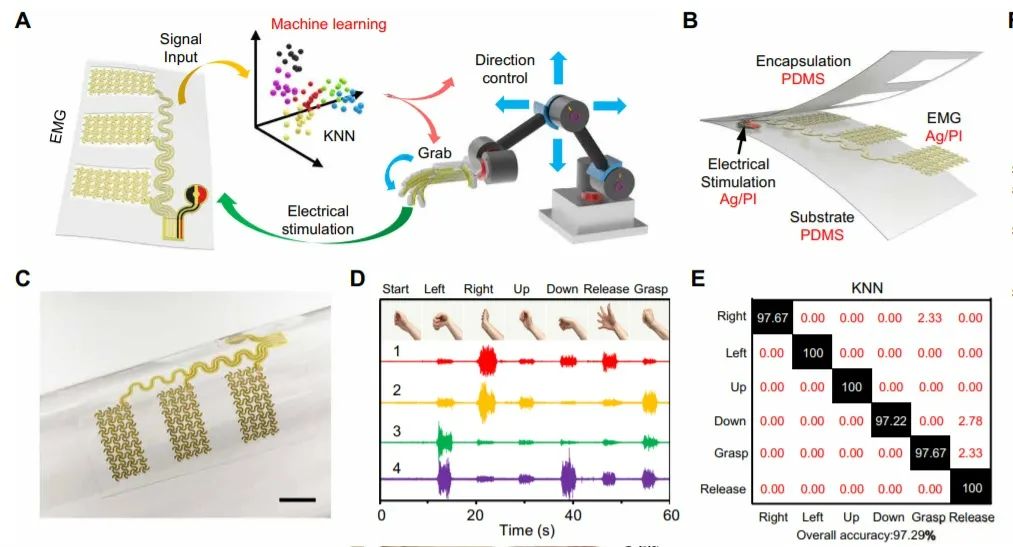
在信号采集后,使用KNN模型解码肌电信号中的运动意图,手腕的简单轻弹即告诉机械臂向上或向下移动,人类手指的握紧或张开会促使机械手做出类似的动作;机器⼈可以在毫秒级的时间内模仿人类的手势,研究人员训练了包含上,下,左,右,抓握,伸张等六种手势,以实现机械臂及机械手的准确操控。
在机械臂向下移动到过程中,激光距离传感器首先被触发,反馈给系统,表明机械手下方有待测物体存在,同时降低移动速度以免过快接触而造成损伤。当机械手识别到物体接触,可以激活触觉和警报反馈,使用两个刺激电极之间的脉冲电流负载来通知人类,人类会感受到皮肤上的温和电刺激——“有点刺痛”。
在下一步进行抓握手势后,机械手抓住被测物体。在抓握动作完成后,又有多个压力传感器被触发,并同时启动相应位置的电化学传感器。电化学传感器对于所触碰的位置进行原位检测,根据信号强弱计算出相应位置的有害物质浓度,并得到有害物质在物体表面的分布情况。
▍未来将提高电子皮肤寿命
在赋予机器人感知能力时,多数研究都将焦点集中在物理信号的感知,如触觉(压力)传感,温度传感等;如果能够增加环境中的化学样品以及生物样品的检测,那将大幅提高机器人感知的应用范围,让机器人代替人类判断有害物质的种类及浓度,以避免人类潜在的暴露风险。
高伟(Wei Gao)教授团队设计的M‑Bot,包含了压力,温度,化学信号及生物信号等多模式传感,在监测压力与温度的同时,也实现了对爆炸物(TNT),神经毒气(有机磷),病毒(新冠病毒)等有害物质的高灵敏度原位检测。
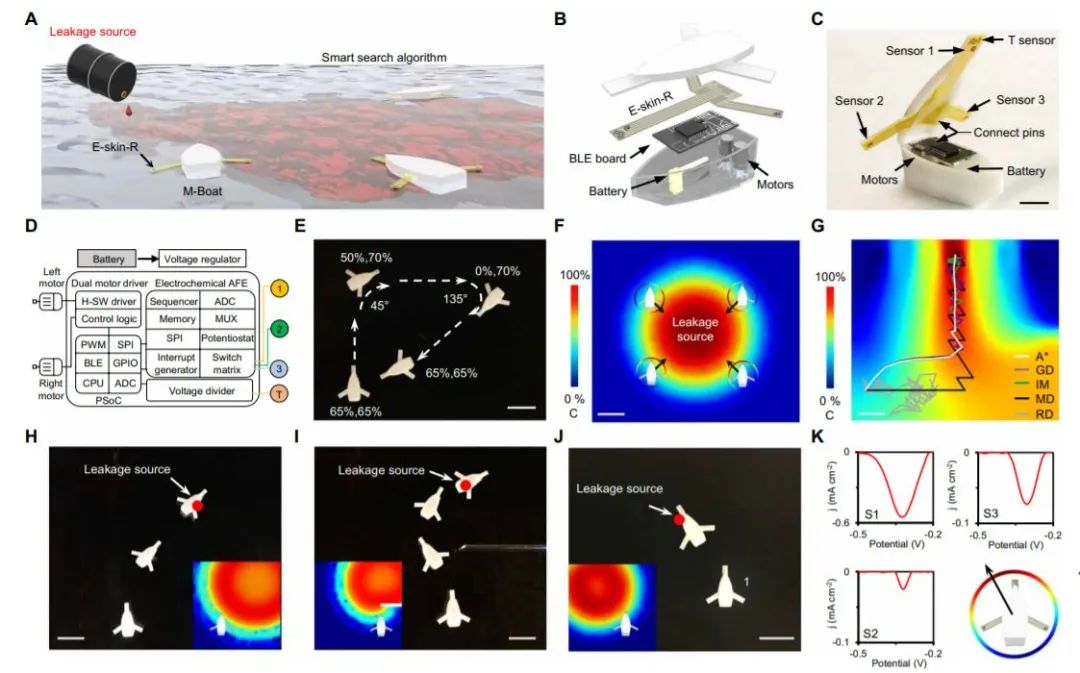
除了机械臂,这种技术还被用在了多模式传感机器⼈船 (M-Boat)上,来检测水下化学品泄漏,可以识别泄露源的空间位置,实时检测周围分析物浓度,还能够在海水中执行连续的危险分析和自主泄漏跟踪。
“我认为我们已经展示了概念验证,” 高伟(Wei Gao)教授表示。“但我们希望提高这种机器人皮肤的稳定性,使其使用寿命更长。通过优化新墨水和新材料,我们希望它可以用于不同类型的目标检测,并将它放在更强大的机器人上,让它变得更聪明”。
推荐新闻
-
国评中心(总部)为安川颁发机器人洁净级认证证书!
2024-09-25 -
JAKA拿下协作机器人全系列CR认证“001”证书
2024-09-19 -
KUKA全系列机器人获得CR认证
2024-09-14 -
2024世界机器人大会机器人行业规范检测与技术分论坛在京圆满举行
2024-08-25 -
国评中心(总部)北京测评中心正式揭牌!
2024-08-24 -
首届智能机器人分级分类评价创新论坛在上海召开
2024-07-05 -
上海成立机器人概念验证中心
2024-06-25 -
【研发成果】轻量化、模块化、智能化的移动机器人面市!
2024-06-20 -
机器人赛道逐渐拓宽,人形机器人正当时?
2024-07-01 -
【祝贺】艾利特CS系列协作机器人通过100000小时MTBF测评!
2024-01-03 -
协作无界,“加”速未来—2023首届中国(盐城)机器人+新能源产业发展大会在盐城顺利召开
2023-12-25

