


官方微信视频号
![]()
身长仅8厘米!日本研发小型月球机器人,网友:有变形金刚那味儿了!
时间:2021-06-24 17:09:00
来源:网络
前言:“俱怀逸兴壮思飞,欲上青天揽明月。”
“俱怀逸兴壮思飞,欲上青天揽明月。”
早在 1000 多年前,中国古人就表达了对皎皎明月的向往。到了 21 世纪的今天,随着科学技术的飞速发展,有越来越多的国家在探索月球的道路上不断前行。
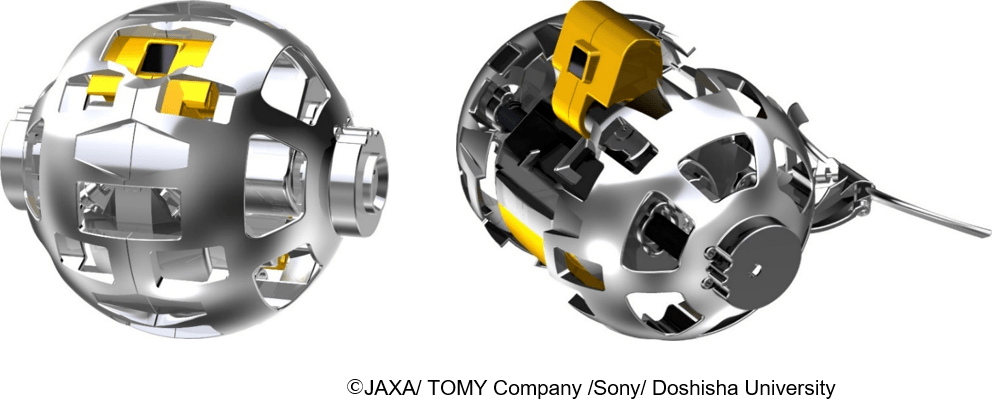
近日,日本宇宙航空研究开发机构(JAXA)宣布制造出了一种可变形的小型机器人,该机器人呈球形,直径仅有 80 毫米,到达月球后会如同变形金刚一样 “长出手脚”,科幻感十足!
月球机器人 “变身”
据介绍,JAXA 计划于 2022 年将其送上月球,用作测试月球表面的尘埃条件,以了解月球引力对风化层的影响。

探索月球,远比想象得更困难
2019 年,JAXA 宣布与丰田汽车公司达成合作,联合研究如何利用燃料电池电动车技术为载人月球漫游车提供动力的技术。一旦该技术实现并应用,就可以大大延长漫游车的续航时间。如此一来,即使可输送到月球的能量有限,这种漫游车在月球表面的总巡航范围也将超过 10000 公里。JAXA 希望能于 2029 年成功发射这种载人月球车。

载人加压月球车的概念图
然而,在对上述系统进行概念研究时,科学家们发现,由于月球环境恶劣(重力是地球的六分之一,表面被风化层和沙尘覆盖,超高辐射、温度、以及超高真空环境),载人漫游车在月球表面行驶时可能遇到各类与地球环境完全不同的情况。
因此,首先需要在月球表面采集各类现实数据,例如月球引力对其表面风化层的作用力以及月球尘埃的数据(一种已知对人和机器有腐蚀性的物质),以便详细研究漫游车所使用的自动驾驶技术和巡航技术。于是,“它” 诞生了。
作为漫游车开发工作的一部分,JAXA 与多家公司机构进行合作,采用玩具制造商 TOMY 公司和同志社大学(Doshisha University)的小型化技术、索尼的控制技术以及 JAXA 空间环境处理开发技术,最终制造出一种小型月球机器人。该机器人呈球形,直径约 80 毫米,重约 250 克,可谓 “超小巧、超紧凑、超轻便”。
不过更让人眼前一亮的,是它会 “魔法”、能 “变形”:一旦在月球上成功部署,它就会 “打开自己”、分成两半,中间有一个连接轴,分开的两半随即充当 “车轮”,让机器人能够在恶劣的月球环境中行动自如。此外,机器人的小巧体积还能显著节省着陆器的空间,有助于减少运输到月球的设备体积。因此,它有望在未来的月球探测任务中发挥积极作用。
那它具体是如何采集数据的呢?当机器人在月球表面行走时,风化层行为图像加上机器人和月球着陆器相机拍摄的月球表面图像,都将通过月球着陆器发送到任务控制中心。而后,获得的数据将用于评估定位算法和风化层对载人加压漫游车驾驶性能的影响。
该机器人计划于 2022 年跟随着陆器,由日本的 ispace 公司负责运输上月球,着陆器将搭载 SpaceX 火箭发射。

月球着陆器
实际上,JAXA 的 “可变形月球机器人” 将会成为 ispace 执行月球运输任务的第二个机器人,因为该公司不久前宣布,它还将从阿拉伯联合酋长国在月球部署一个名为 Rashid 的漫游车。如果这两次任务均宣告成功,日本和阿联酋将加入继苏联、美国和中国之后,成为第四、第五位成功在月球上软着陆航天器的国家。
与拥有众多成就的中国航天相比较,日本的航天历史其实也不算短。1998 年 7 月,日本曾发射过一个火星探测器 “行星 - B”,使得日本成为世界上第 3 个发射火星探测器的国家。
2003 年 5 月,日本发射了 “隼鸟” 号小行星探测器,尽管遭遇多次故障,但 “隼鸟” 号最终成功造访了小行星 “丝川”,并在 2010 年带着样本重返地球,成为人类首个从小行星上带回物质的探测器。2014 年 12 月,日本发射了 “隼鸟 2 号” 小行星探测器,经过约 3 年半的长途太空旅行,“隼鸟 2 号” 小行星探测器成功飞抵目标小行星 “龙宫”。

成功飞抵小行星 “龙宫” 的 “隼鸟 2 号” 探测器
此后,日本就一直致力于从小行星上取得陨石样本,以研究小行星的形成历史和太阳系的演化等问题,小行星探测未来在资源开发中可能也具有重大意义。
2015 年 6 月,JAXA 宣布计划于 2022 年发射火星卫星探测器,并计划使探测器在火星最大的卫星 “火卫一” 上着陆采集样本并带回地球。
同时,日本也是月球探测的主要国家之一。日本的月球探测最早可追溯到 1990 年,当时日本发射了一个月球轨道探测器并于 1992 年抵达月球轨道,成为世界上第 3 个抵达月球轨道的国家。
目前,尽管关于可变形机器人的细节还较少(因为它仍在开发中),但可以确信的是,一旦将其在月球上成功部署,后续的超长续航月球漫游车系统也会更快问世。
推荐新闻
-
国评中心(总部)为安川颁发机器人洁净级认证证书!
2024-09-25 -
JAKA拿下协作机器人全系列CR认证“001”证书
2024-09-19 -
KUKA全系列机器人获得CR认证
2024-09-14 -
2024世界机器人大会机器人行业规范检测与技术分论坛在京圆满举行
2024-08-25 -
国评中心(总部)北京测评中心正式揭牌!
2024-08-24 -
首届智能机器人分级分类评价创新论坛在上海召开
2024-07-05 -
上海成立机器人概念验证中心
2024-06-25 -
【研发成果】轻量化、模块化、智能化的移动机器人面市!
2024-06-20 -
机器人赛道逐渐拓宽,人形机器人正当时?
2024-07-01 -
【祝贺】艾利特CS系列协作机器人通过100000小时MTBF测评!
2024-01-03 -
协作无界,“加”速未来—2023首届中国(盐城)机器人+新能源产业发展大会在盐城顺利召开
2023-12-25

